

毕设背景
大家好,我的毕业设计是一款STEAM教育的仿生机构学习套件。接下来我会介绍我整个毕设过程。在开头我想感谢一下我的毕设导师赵斌,我的大一大二都是在不断划水中度过,每天无非就是起来喂喂鱼打打游戏跟舍友讨论一下吃什么,找找有什么好玩的游戏,每个软件都是半桶水,对我的未来也是很迷茫,到底喜欢做什么,到底以后想要什么,想过什么样的人生,没有足够的人生经历却不断地向内求只会让我更加陷入虚无主义的漩涡,当大二下学期的一次课程偶然认识到赵斌老师,在对话中突然有一种很奇妙的熟悉感,我能感受到他身上渊博的知识,然后就是在选中心选导师的时候都选择了赵斌老师,后面也是对我提供了很多的帮助,甚至还能记得我的生日即使我也是从来都不怎么过。就是在各种机缘巧合下,我的毕设逐渐变得清晰。
毕设的开始
毕设这里我想感谢一下在上海实习的时候的公司老板杨文庆老师,我在上海实习的时候见识不断扩大,我开始寻找我的道路。当我准备为我的毕设预热的时候我非常的焦虑,虽然导师也说过可以做自己想做的但是还是不知道什么样的毕设能让我把个人能力发挥到极致,这个时候在实习的时候杨老师就给了我一个项目方向:STEAM教具,当我了解后才发现原来都是我小时候爱玩的玩具和游戏,然后就在请示后当作我的毕设方向,我尝试去寻找我能做的设计的过程也是一条很漫长的道路,做什么类型的玩具用什么样的形式去体现,天马行空想了很多个方案也不知道要怎么筛选,同时也正好面临大四上半年找工作的热潮,身边好多人都找到offer,只有我像脱离开这个世界的无事人一样,各种的外界压力加上毕设还没有一个具象表达的时候,赵斌老师跟我说:“如果你还没想好未来的事情,那就专注当下,专注做好你的毕设。”然后在他一个非常明确的毕设甘特图下,我的毕设历程开始了
毕设的过程
前言
开始介绍我的毕设历程之前我很开心能做自己擅长并喜欢的事情来当作我的毕设,如果在看这篇文章的你正在面临毕设选题这个问题,我想你也可以去追寻自己的内心去与导师沟通你想要做的或者是你擅长的,这段长达大半年的马拉松选择更为重要。除此之外,当你的毕设是超越你以往的各种能力的时候,这个过程会煎熬也会充满各种负面情绪,同样会不断锤炼锻造你的心智。全身心投入去做你的毕业设计这会对你以后的人生有非常大的帮助,接下来我会介绍我的整个毕设过程。
在这里,我有一个特别欣赏的毕设,就是班长李芭嫩的男士理发立柱,点击超链接可跳转→
洞察痛点
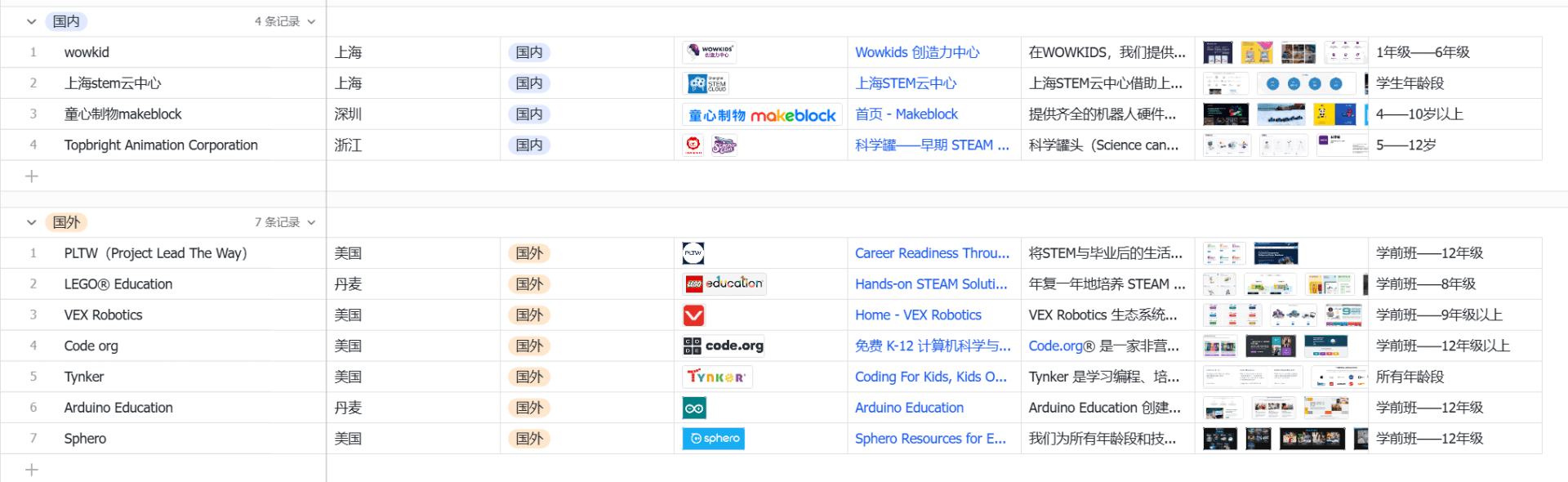
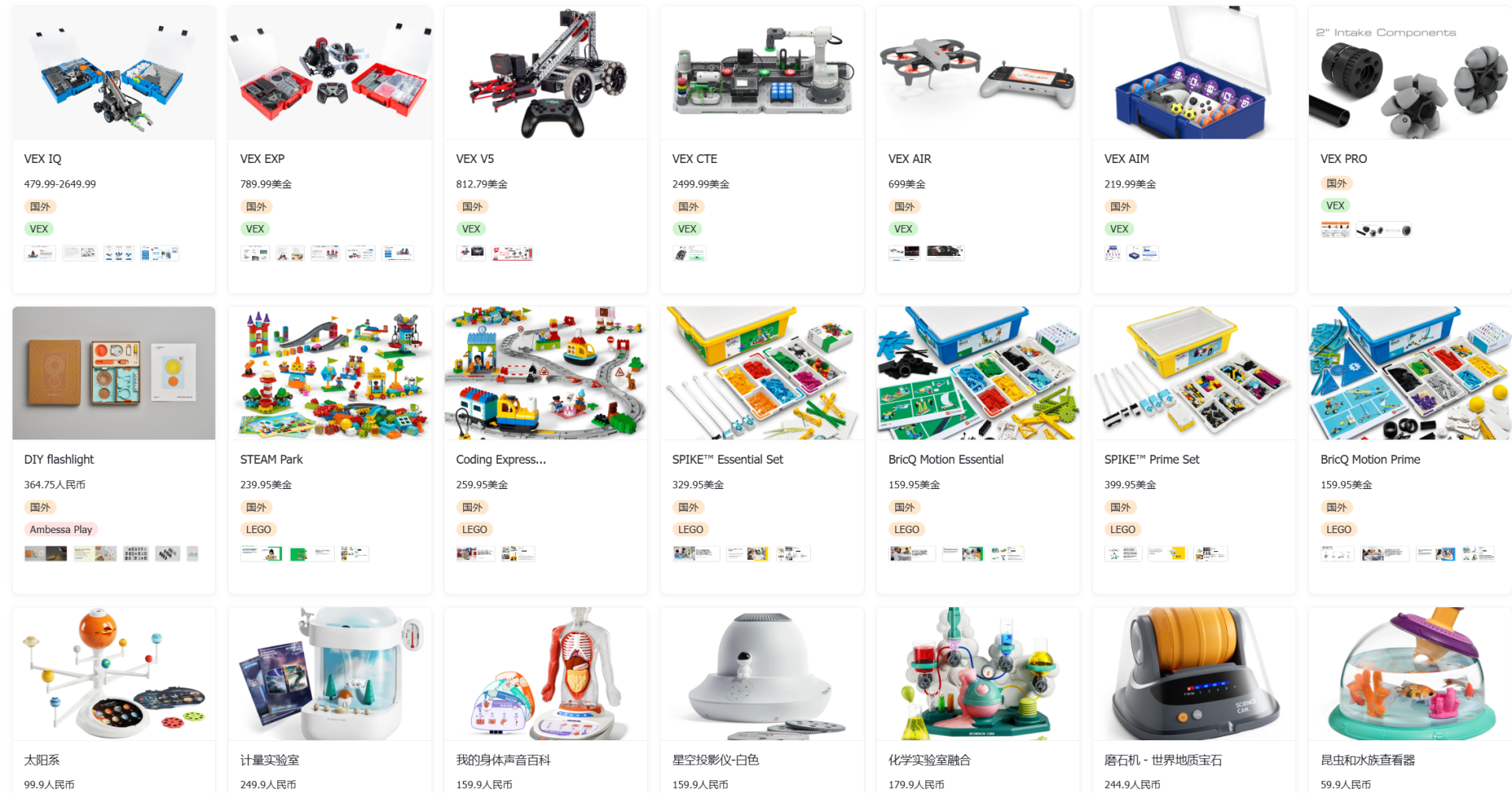
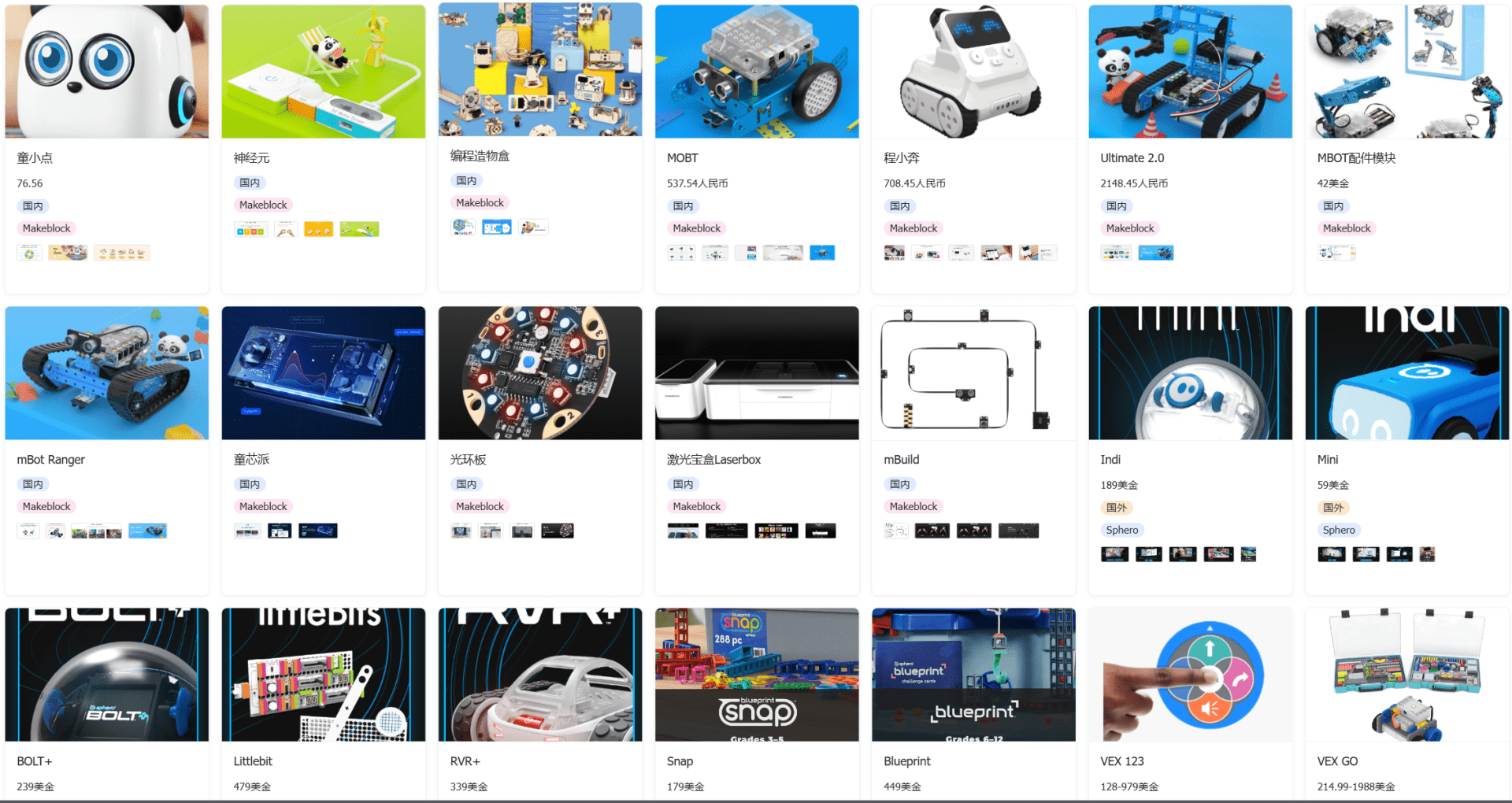
选题方向确定后,产品库搭建,相关网站收集,设计方案都进行的比较顺利,在浏览STEAM教具的时候,我发现我以前接触的大多数都是积木类型,因为零件的特殊每次拼搭都会耗尽我一整天的时间,很多原因都是太多重复和复杂的堆叠然后还有拼错后要拼尽全力撬开,但是还是乐此不疲,另一个种类大多数为编程教具,学习门槛实在是太高,连我一个大学生在前期研究的时候都像一个小老弟,所以我在想有没有介于两者之间的一款教具能平滑的过渡,因为编程是关于控制一些机械运动和一些传感器等,所以我想从机械运动入手将复杂的齿轮机构学习变成一组渐进式难度的仿生机构学习套件。利用仿生生物的形式主要是因为我对生物的律动感比较敏感并且对这方面有很大的兴趣,这会让我保持感受的同时有源源不断的动力去迭代和修改。
头脑风暴
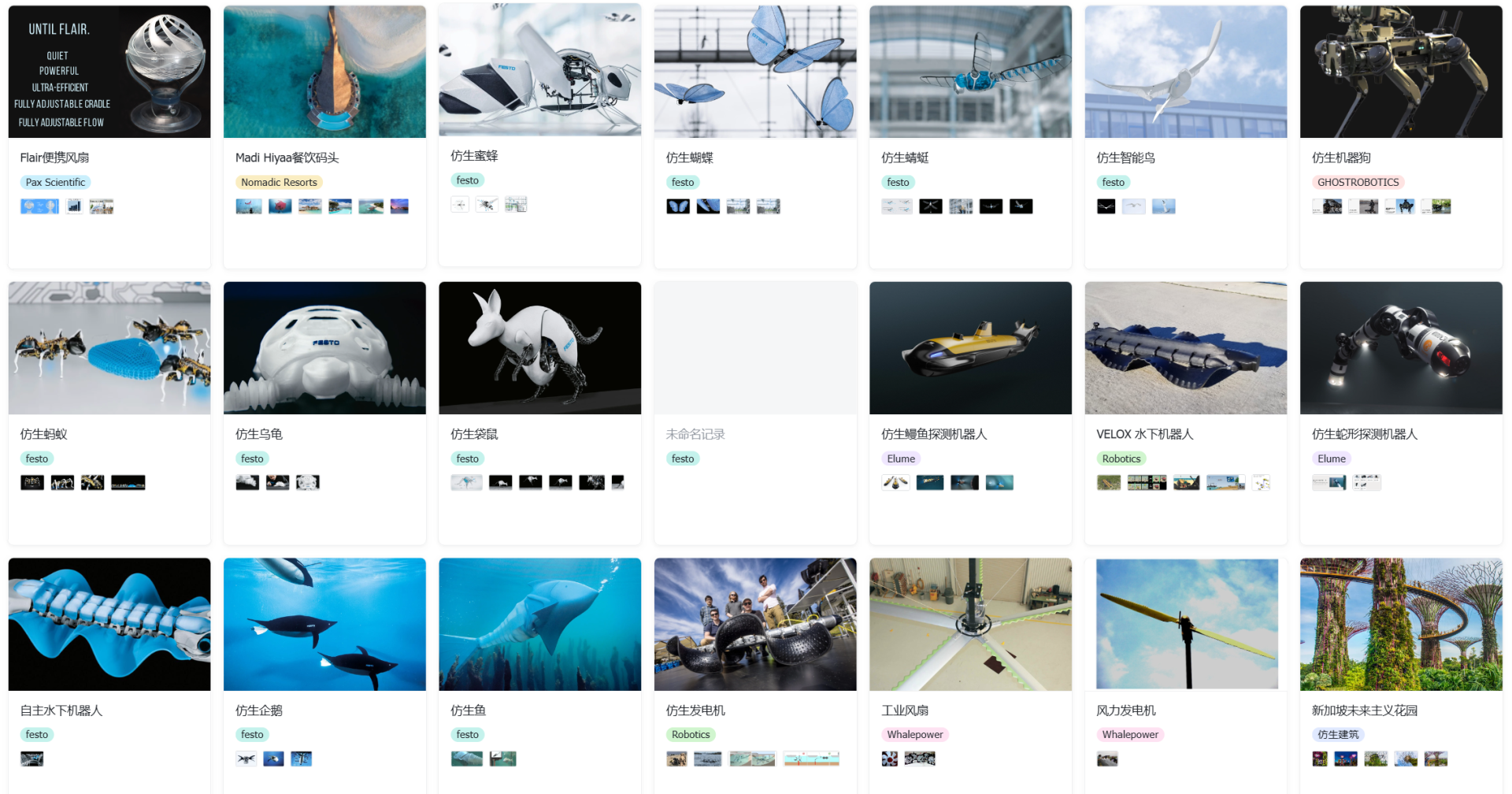
前期的头脑风暴虽然很绞尽脑汁但是非常有意思,儿时丰富的想象力派上用场,以前各种幼稚的幻想都可以通过现在的能力去做出来,这对我来说意义非凡,各种奇妙的世界观?或者是设计出一个种族的新生物?给它们加上各种各样的能力?有一个丰富的背景也是非常能吸引人心,甚至可以去扩展无限的可能,这让我在前期有着非常大的动力,当你的头脑风暴想出足够多的方案时,就可以开始整理它的可能性,时间上的安排,个能力上的评估等,再去筛选跟优化里面的内容。
敲定方案
当我在纠结用什么样的形式表达时想起了以前做的一次课程作业且结合上老师的建议,最终敲定制作一组具有单线进化的新生物STEAM教育仿生机构学习套件,分为幼体,亚成体,成体三个阶段,随着学习者的能力提升至下一个阶段后会变得更复杂,通过拼装后固定在我设计的电机底座进行律动,再加上磁吸仿生外壳来让它看起来像一种新生物。当确定好更细致的方向后就开始需要一些理论上和草图的支撑,让你的导师知道它的大致效果,我非常欠缺草图上的能力,但是导师帮我预算了两到三个星期去练习和画方案,我购买了一些跟设计新生物相关的书籍,然后每天都浏览各种网站去找灵感,后来总结的大致想法就是先用我们常见的生物骨骼剪影再去在身上去叠加仿生机构,这样一来能让第一次见到它的人会有一种熟悉感,一种平易近人的感觉,然后是设计给小孩的年龄段所以在外观上体型要减少一些攻击性,最后就是支架和外壳要有仿生感的同时保持圆润亲肤。
如何体现STEAM教育
大致解释一下STEAM教育以及我是如何打算在我的设计上融入进去,STEAM是科学 (Science)、技术(Technology)、工程(Engineering)、艺术(Arts)和数学(Mathematics)等学科的英文首字母缩写。STEAM教育就是整合了科学、技术、工程、艺术和数学多领域知识的综合教育方式,它强调学科的融合性、多元性与包容性,希望打破学科领域的边界,同时培养儿童发现问题,并基于科学、技术、工程、数学多学科解决问题的能力。但它并不是这五门学科的简单拼接,而是多学科知识基于解决现实问题背景下的有机融合。
S (Science – 科学):探索物理反馈与生物规律
- 直观的物理认知: 抛弃掉电子屏幕,让学习者通过亲手拨动零件,直观理解齿轮变速、摩擦力以及圆周运动如何转化为复杂的直线或往复运动并实现生物感的过程。
- 仿生学概念引入: 融入“幼年体、亚成体、成体”的生物进化阶段,让机械运动符合生物形态学(如模拟小狗爬行或飞龙扑翼)的发展规律。
T (Technology – 技术):制造技术与智能拓展
- 现代制造技术的体现: 产品的诞生过程深度依赖3D建模与快速成型技术,向学习者展示了现代科技的支持下如何将概念转化为实物。
- 预留技术升级接口: 通过设计的电机底座,玩具可以从纯手动跨越到电动。未来还可以无缝接入图形化编程模块,实现从机械动力向智能控制的技术升级。
E (Engineering – 工程):模块化架构与系统思维
- 低容错设计: 采用“预设孔位插销”和“磁吸外壳”,这是经典的工程学防呆理念。它降低了初期操作门槛,保护了初学者的探索欲。
- 迭代与解决问题的闭环: 渐进式连杆和齿轮的重组玩法,鼓励学习者像工程师一样思考。他们需要在拼搭中不断试错,解决连杆卡顿或运动死点等实际工程问题。
A (Art – 艺术):形态美学与完整体验
- 打破常规的视觉张力: 抛弃掉传统教具刻板的塑料感,使用极具视觉冲击力的配色与流线型外壳并赋予金属质感。
- 完整的设计体验: 通过完整的包装以及无字说明书细节的流程来完成整个拼装,体验整个过程的知识
M (Mathematics – 数学):空间几何与精密逻辑
- 立体几何推演: 学习者在搭配不同孔距的连杆与不同齿数的齿轮时,本质上是在进行三维空间内的几何逻辑推理。
- 精密度感知: 从组装时的松紧程度中,学习者能建立起对尺寸、公差配合等基础工程数学概念的潜意识认知。
设计过程第一阶段
接下来我将展示我整个设计过程中是怎么量变引起质变。
2025.12.22
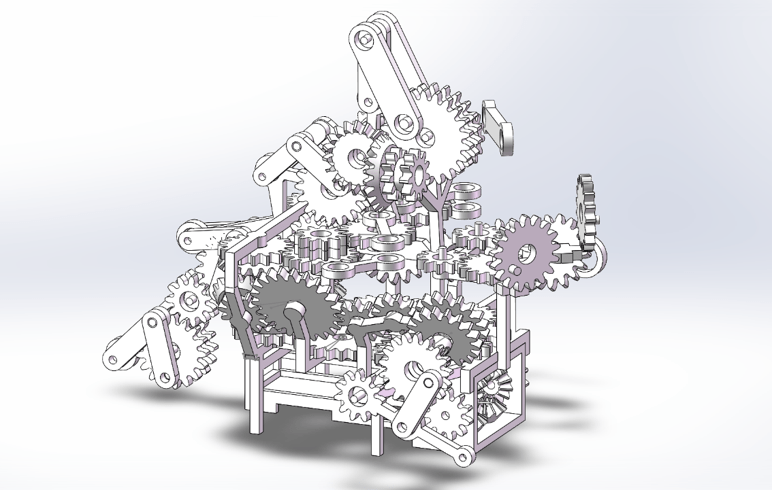
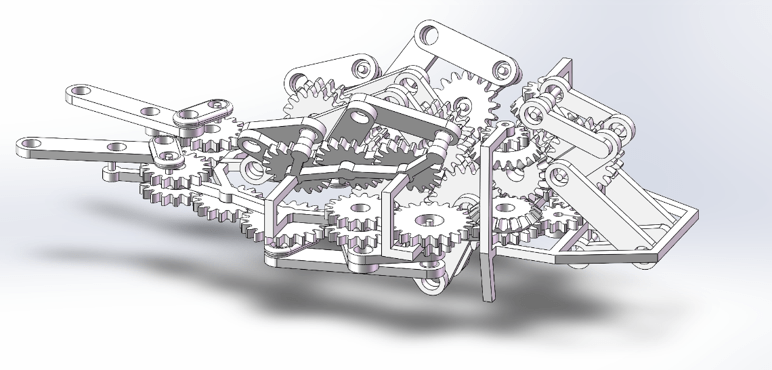
在前期调研工作差不多后,我学习了一个月SolidWorks建模软件,结合之前在其他建模软件的基础,掌握了部分建模思路和物理仿真动画后,将想要做的机构和齿轮都大概整理在一个模型上,拼成了一个四不像,并运动仿真和进行实物打样模拟。这里有个原因是因为我一直在草图上没有进展,然后导师教我可以先从我擅长的地方出发,变成从内向外的发展,这样有个缺陷就是在外观确立后要重新调整内部结构,不过我能一直从中能熟悉更多的操作。
2025.12.24
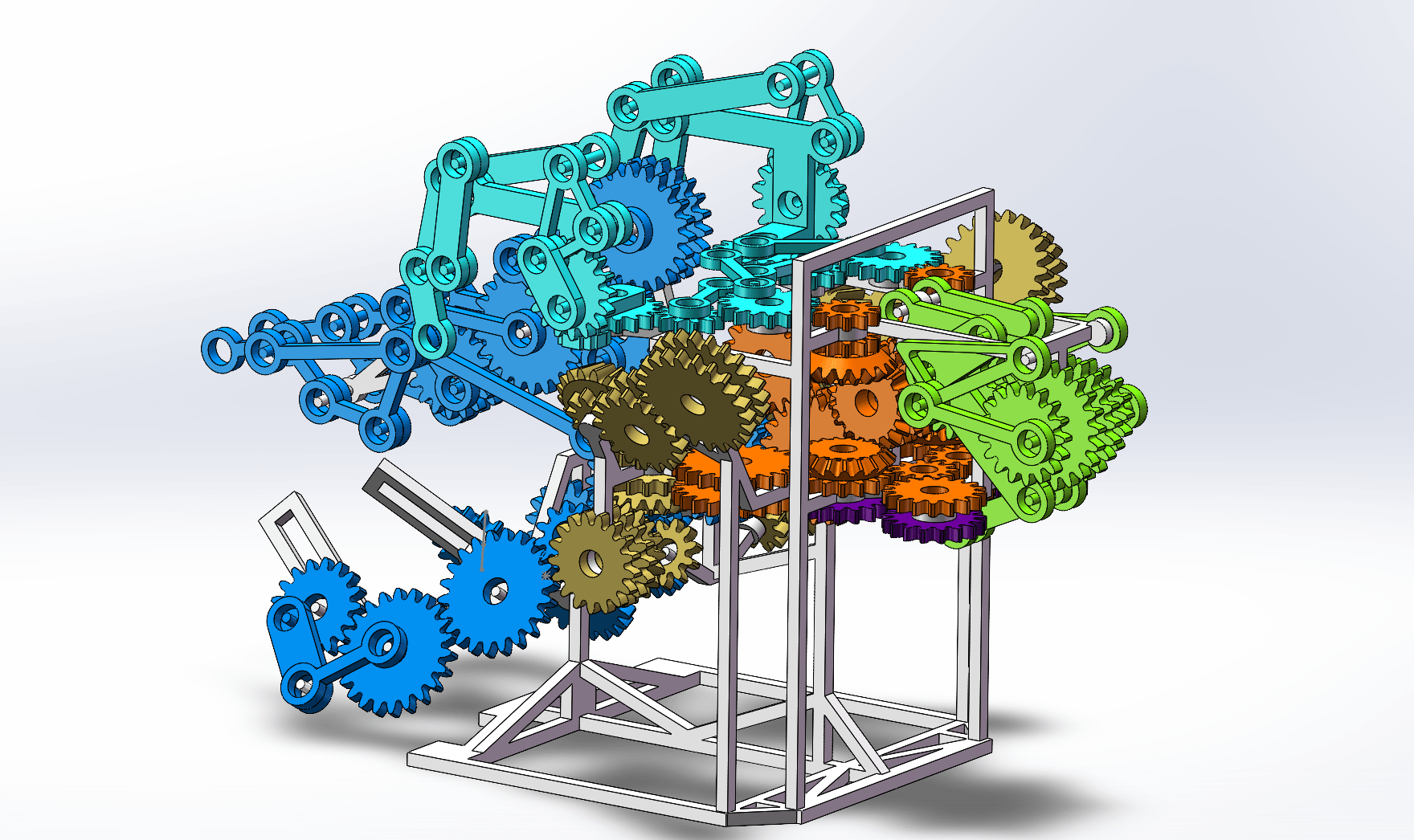
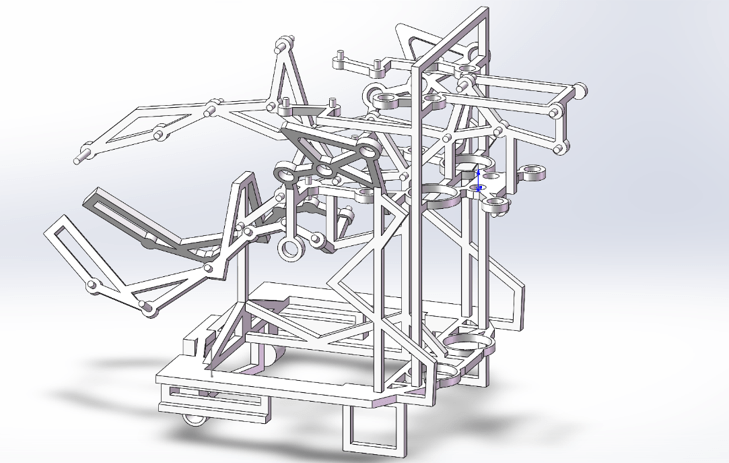
在实验完机构的过程后,记录了干涉的地方,并尝试做出仿生外观并结合齿轮和连杆做出生物感律动,本来的打算是可以通过一个支架的拼装做出三种形态,但是当时的时间节点已经不允许我做得更多更难了,我必须要确定一个大致的感觉并先搭建出一个能实现物理支撑的支架
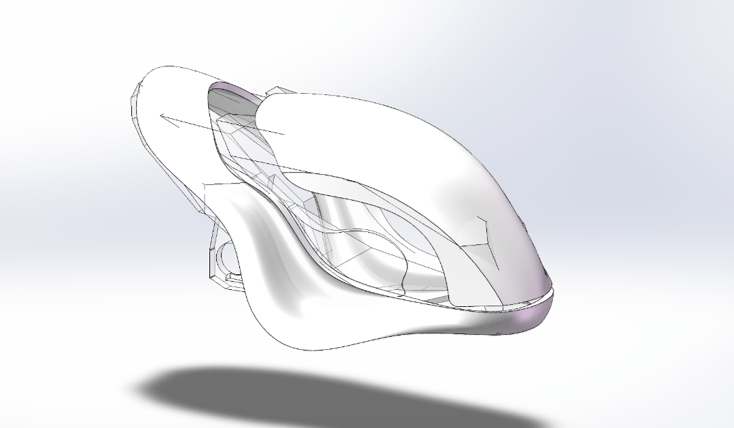
2025.12.28
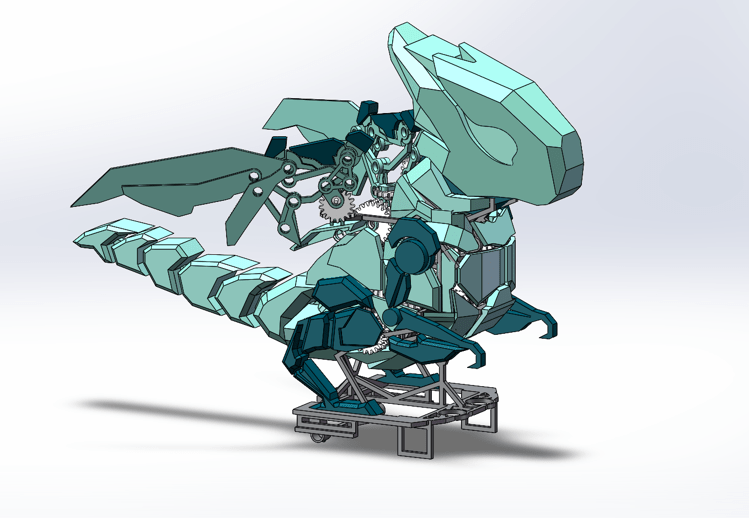
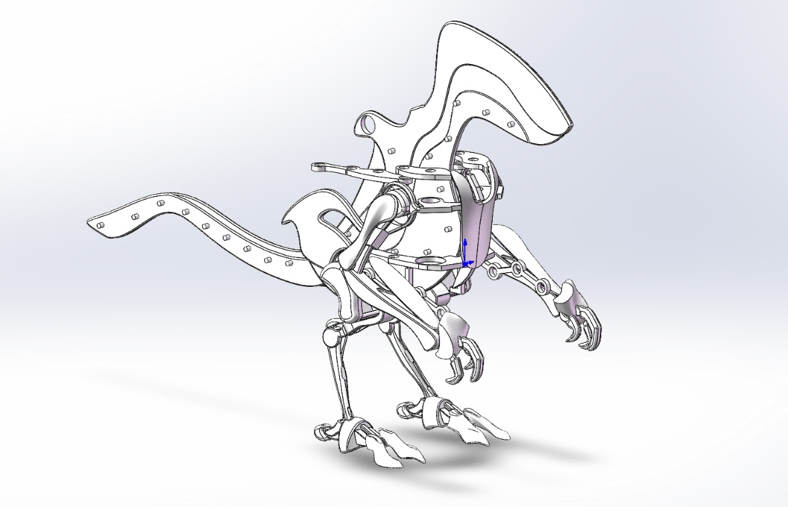
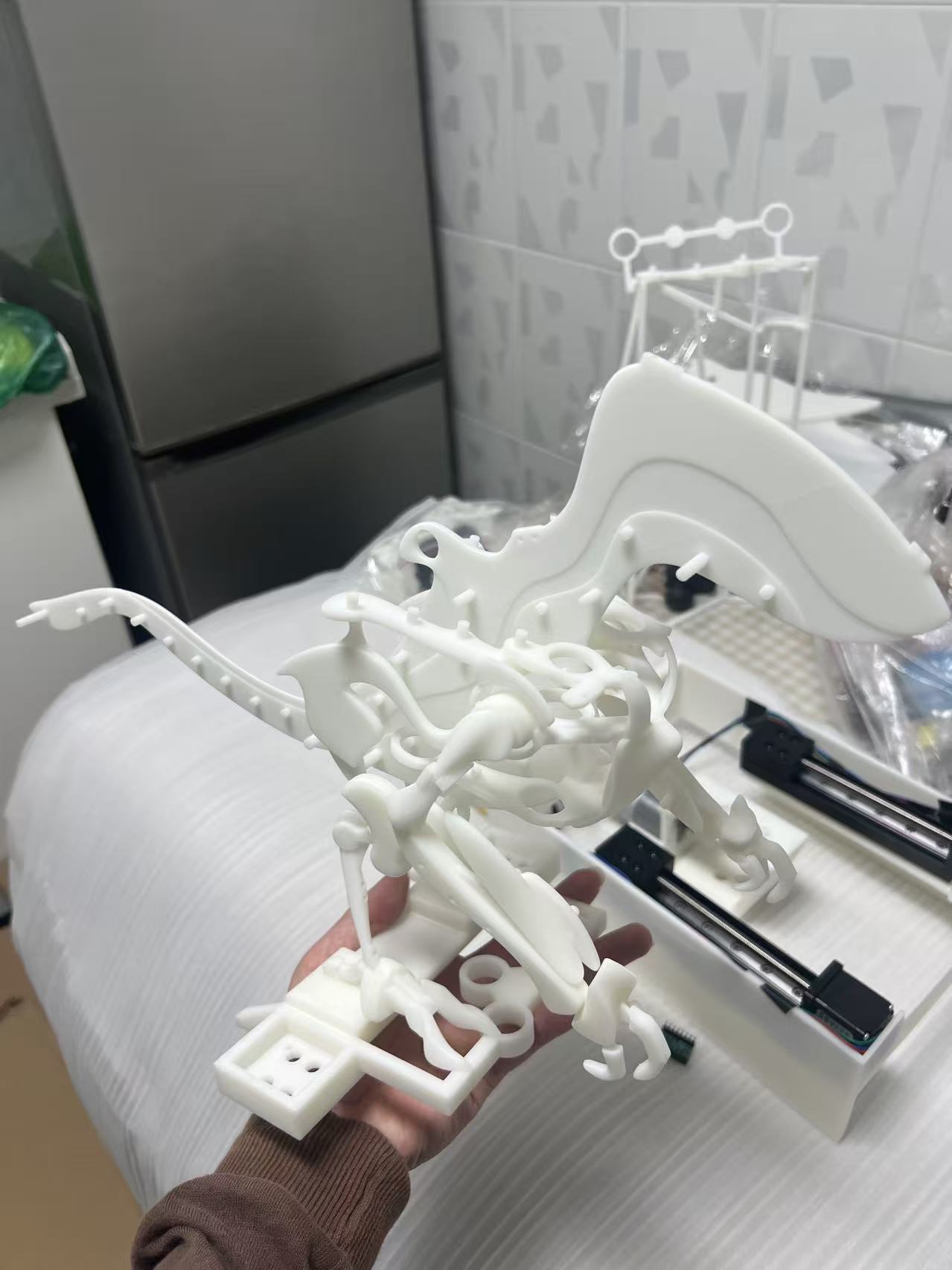
最终选择了双足鸟类动物的骨架剪影来当作基础支架,然后进行尝试仿生生物外观建模后,开始做出一款新生物造型,设计出不同机构排布好位置后再做出支架,最后在需要受力位置加上加强筋使整个结构稳固,最后加上机构进行物理仿真模拟,然后打样进行实物操作。
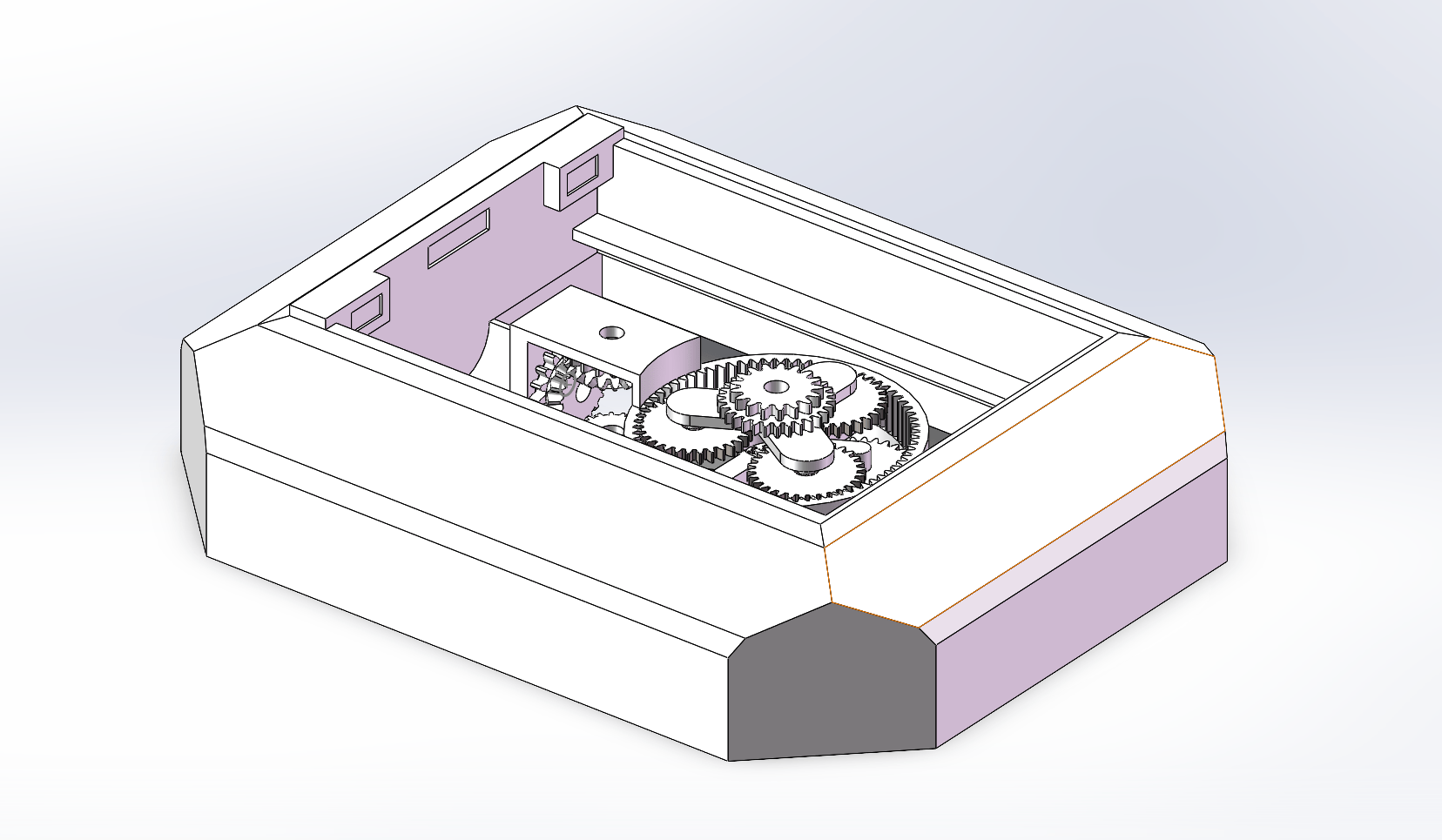
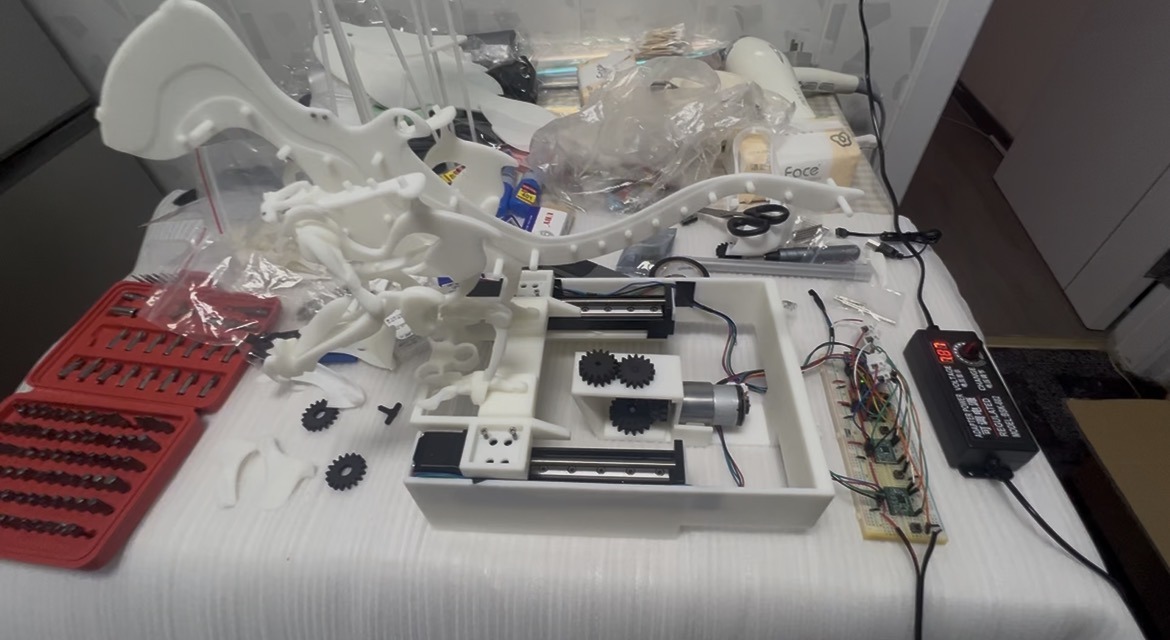
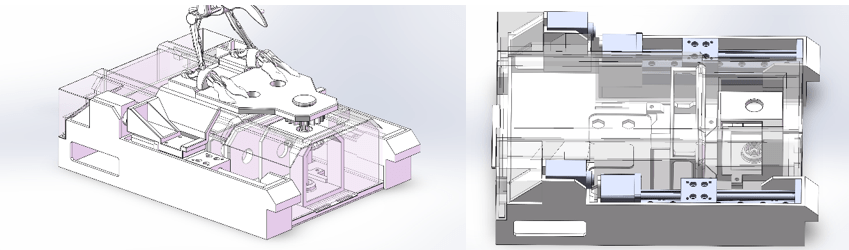
这是当时同时间段做好的电机底座,将电机固定在中后部,传动逻辑是生物支架从滑轨平移进底座最后会有三个磁吸槽固定住,然后通过对准的齿轮进行传动,并有设计了新视觉效果的行星齿轮减速机构。

这个想法在实验后也是失败,原因是支架齿轮与底座齿轮连接之间的对准需要运气成分,这样的设计并不成熟,然后电机的固定方式也要再次调整。打样的耗材是光固化白色树脂。
2026.1.19——2026.1.23
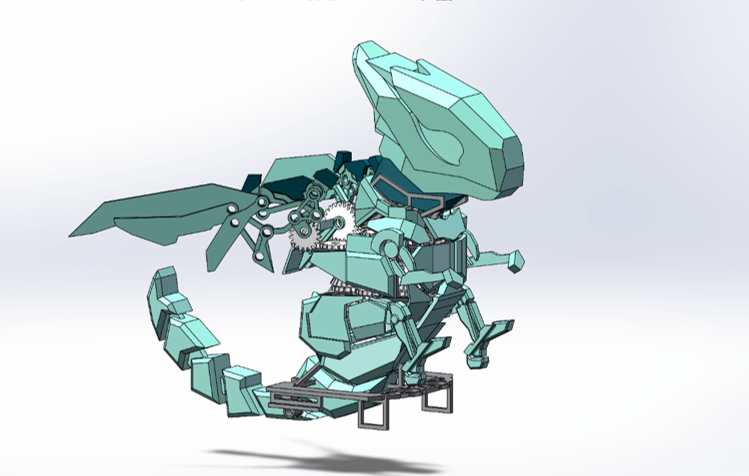
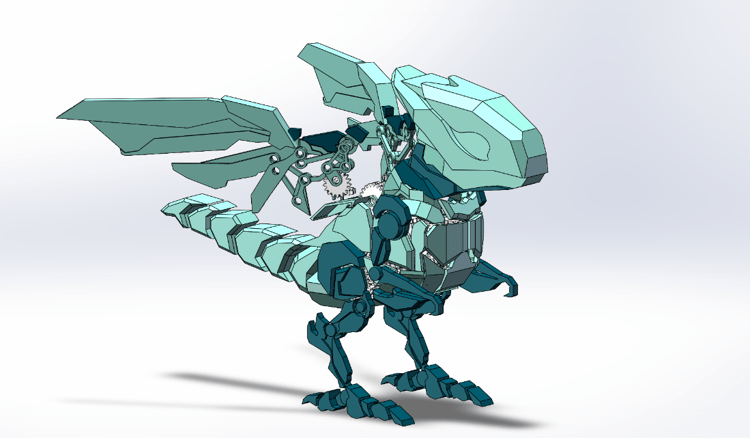
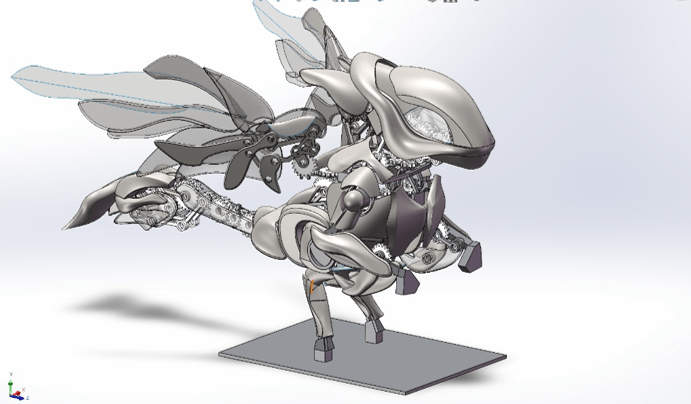
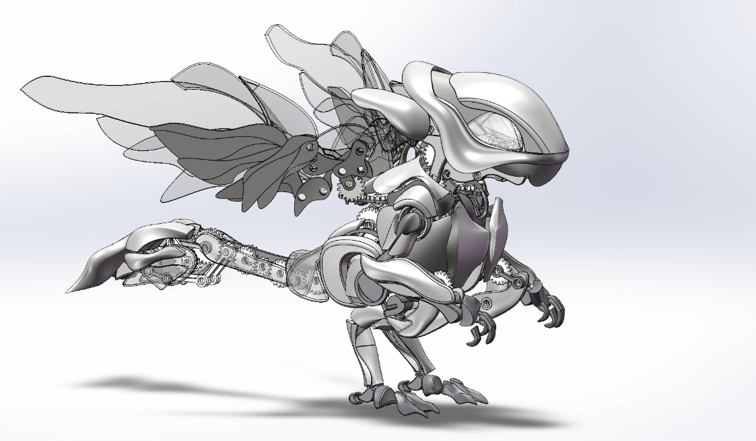
一开始的想法是做一只三条尾巴的飞行生物,但是考虑到科学性的问题最终取消这个想法。第二版附图的想法是展示飞行时的状态,当时做得太深入没有很好的考虑到整体造型,后来汇报的时候才发现做得有点像在坐马桶的感觉。第三版继续修改了一个大体态的变化,使其像鸟类动物的感觉,腿部改用鸟类的反关节”。第四版修改了第三版的体型,因为第三版腿部三段骨骼的长度比例和角度接近蹲下的姿态,而非鸟类站立的姿态,并继续对翅膀和手部做了延展。
以上是我第一个阶段产出的结果,主要是调研的完整度,软件学习,机械机构设计,进度0到1外观设计。
设计过程第二阶段
当时产出大致外观后还是比较开心,因为是快速用立体方块和圆柱成型,曲面外壳建模的困难和完善设计对我冲击最大的还在后头。
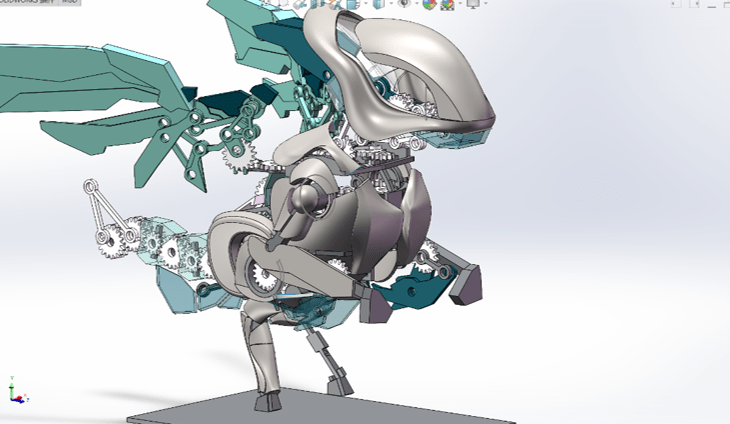
2026.2.8——2026.3.3
在学习sw的曲面建模的时候非常困难,再加上跟以往学习的软件建模逻辑不一样,教程比较少差不多都是自己慢慢摸索,这段时间我经历了很多种情绪,每天都在否定昨天的自己,一直打磨曲面的角度和美观性,唯一不变的事情是我每天建模之前都会去各种网站翻阅好看的曲面,动物的曲线,然后再开始建模,这个期间我完全把自己封闭起来,连与导师的沟通都没有,把全部的精力专注在做好这件事情上,隔绝外界的所有打扰。现在看来真的是一件非常有冒险性的事情,我们在做设计的时候很容易陷入当局者迷的状态,当做到一定程度的时候一定要把自己的视角拉长与身边人沟通,这才是长远之计。
2026.3.7
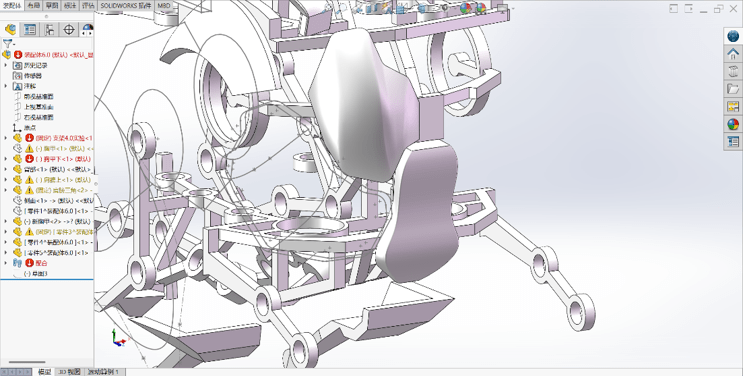
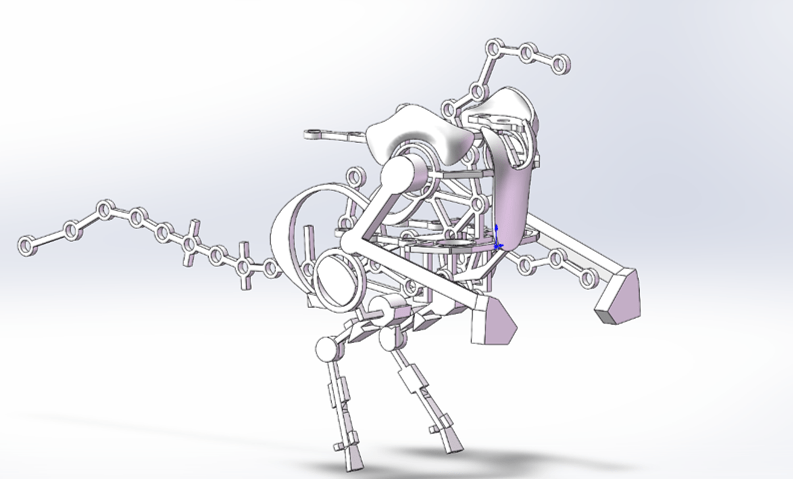
优化完模型外壳后便继续制作内部支架,第一版的外形主要是想做出仿生骨架的感觉,所以只是确定预留孔位后没有做太多的处理,并在一些部位增加仿生骨架的感觉。 直至之前也尝试过很多方法做仿生骨架,包括用衍生式生成等工具因为仿生骨架的制作难度比较高且后期添加加强筋会显得很乱,所以在中间选择了它的剪影来作为支架,并设计出手部和脚部的细节。预留的孔位都改成柱子的形式连接齿轮。
2026.3.13
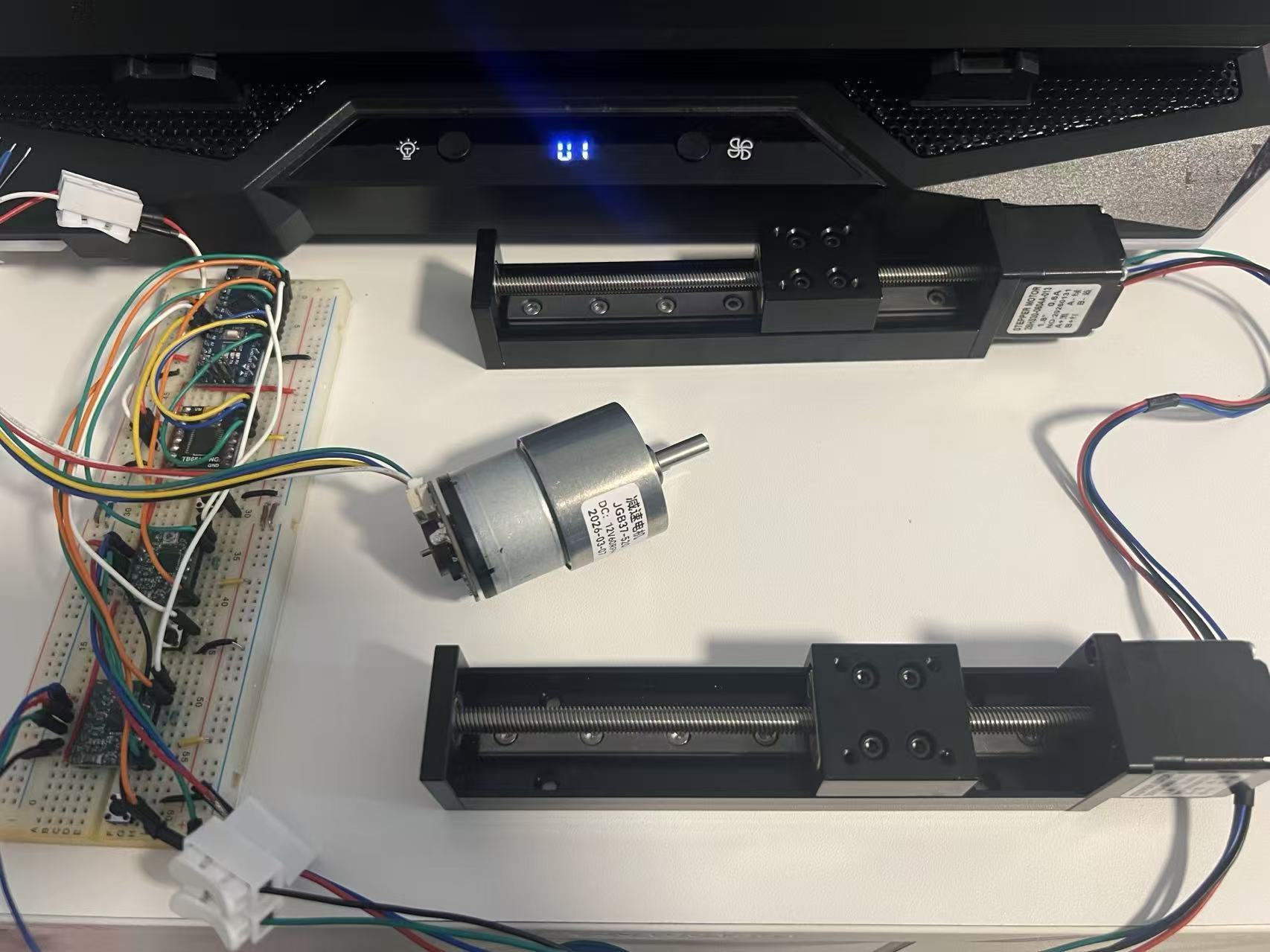
这个时候我已经回到上海继续完成毕设,一边借助公司的3D打印进行测试一边继续优化连杆的幅度和继续优化翅膀的形态,并在做效果图和准备一些打样以及后期的工作。一次偶然的机会认识到电机滑轨,我感觉非常适合来替换掉之前的滑轨,然后立刻投入研究,并加上电机一起来编程。
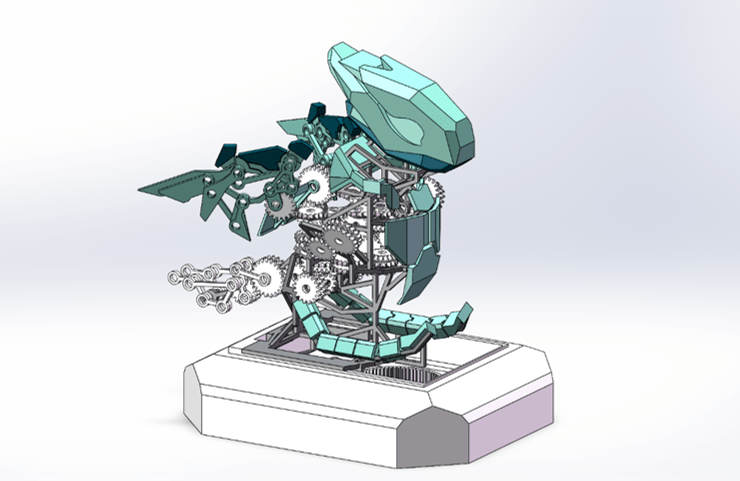
2026.4.1
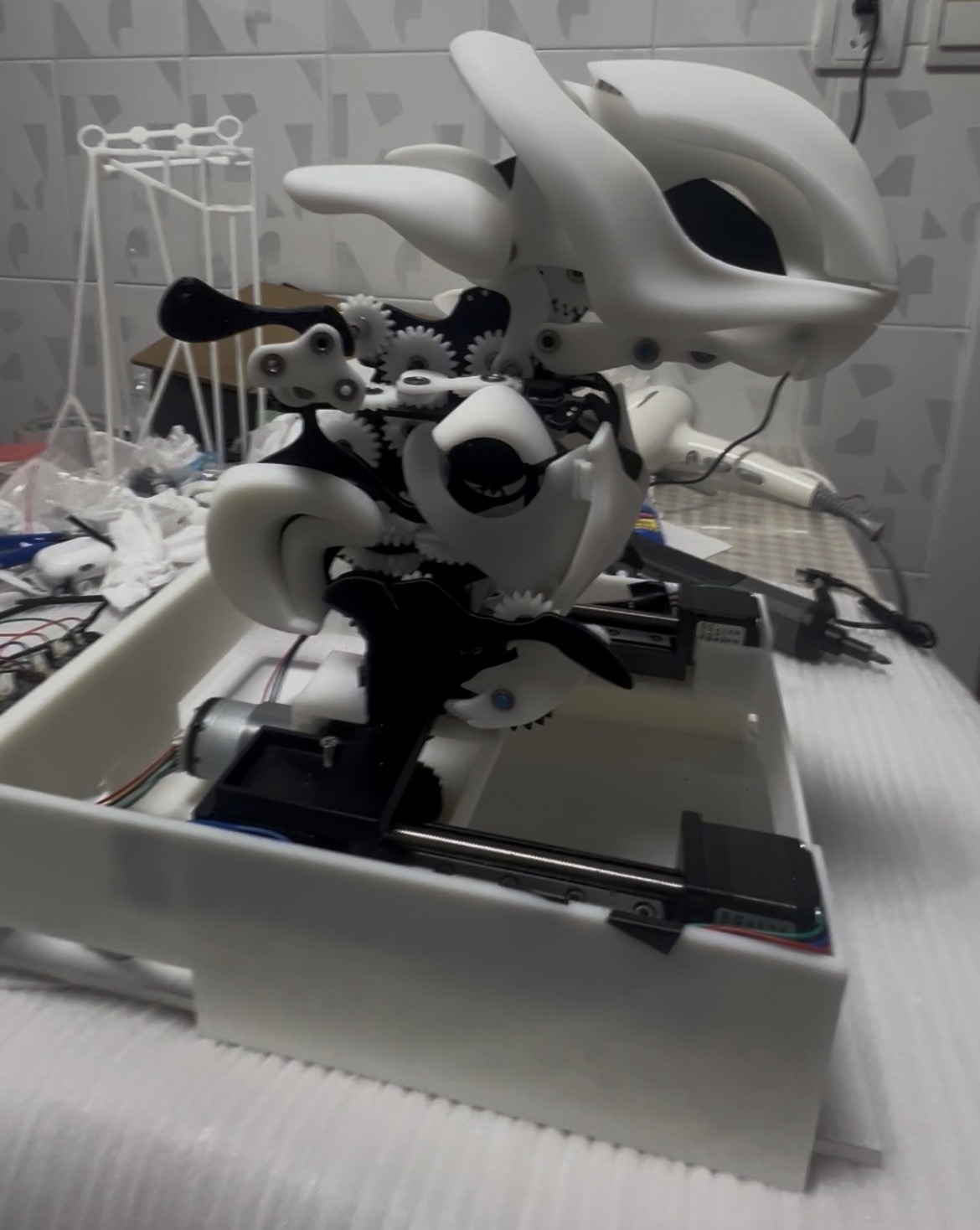
第二版的电机底座,我舍弃了普通导轨和磁铁固定的方式,并且不用手动对齐齿轮,采用编程的方式使用两个电机导轨和使用十字轴来连接上下齿轮来传动。因为白料光固化后有一定的形变,然后我用petg耗材打印了上半身来验证,然后也是能成功运转。接下来我要加更多隐藏支撑来保证整个支架打印出来不变形以及电机底座的优化。
2026.4.20
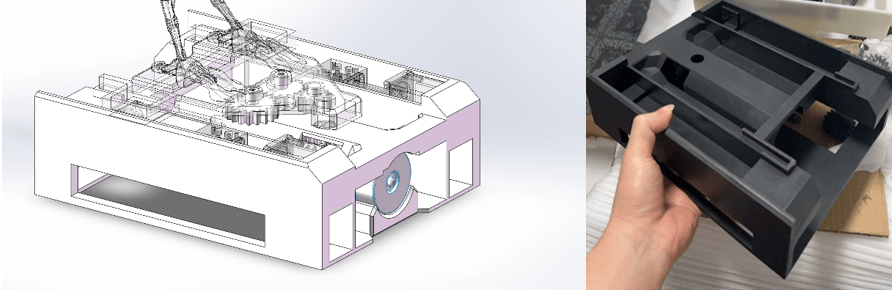
第三版底座在第二版基础上做了一体化的设计,并将电机换成了无刷电机减少了第二版电机的噪音,并在内部预留了可以摆放面包板的位置并在底部加入卡扣槽。最后因为无刷电机的扭矩太小以及无法融入编程这一版的方案就到此为止了。



这一版实物制作我发现了在软件上模拟不出来的重力问题,到最后我一直更换不同材质也没能解决这个问题,要把这部分的机构全部重新设计才能解决,这是我给后面预留太少时间所带来的致命失误。内部支架耗材为更坚固不易变形的黑色树脂。
2026.5.1
第四版电机结合了上一版的优点,由于装配难度的问题我把整体分成了顶盖,底座,电机模块,减速模块,传动模块,将无刷电机换成扭矩更大的变速电机,加入减速箱后扭矩会更大,并且增加了两个行程开关,支架碰到后会自动停止,将卡扣换成磁吸的方式,并将串联齿轮的杆换成六边形。


这里我非常感谢在上海认识的一个20多年模型大佬,他免费帮我做出我想要喷漆效果手板,因为时间的问题没能亲自为我的模型喷漆,不过正因为他的效果手板我后面才能省下更多的时间去完成模型制作,他一直在帮我解决颜色以及工艺上的问题,可惜认识不久我就要回学校准备毕设展没能很好的继续交流,以后有机会我一定会登门拜访,我一直会记住这份恩情。
以上是我总结的第二阶段,一直在迭代和实物打样以及进行模拟以及最后的配色喷漆方案
设计过程最后阶段





我把效果图手板寄给我一直打样的厂家后在等待模型打样喷漆的同时就进行各种渲染效果图。把之前设计的配色都尝试了一下







模型拼装过程





在制作完成模型后我设计了一个网站来展示它,然后包含说明书和包装最后加上一些小卡片


小插曲
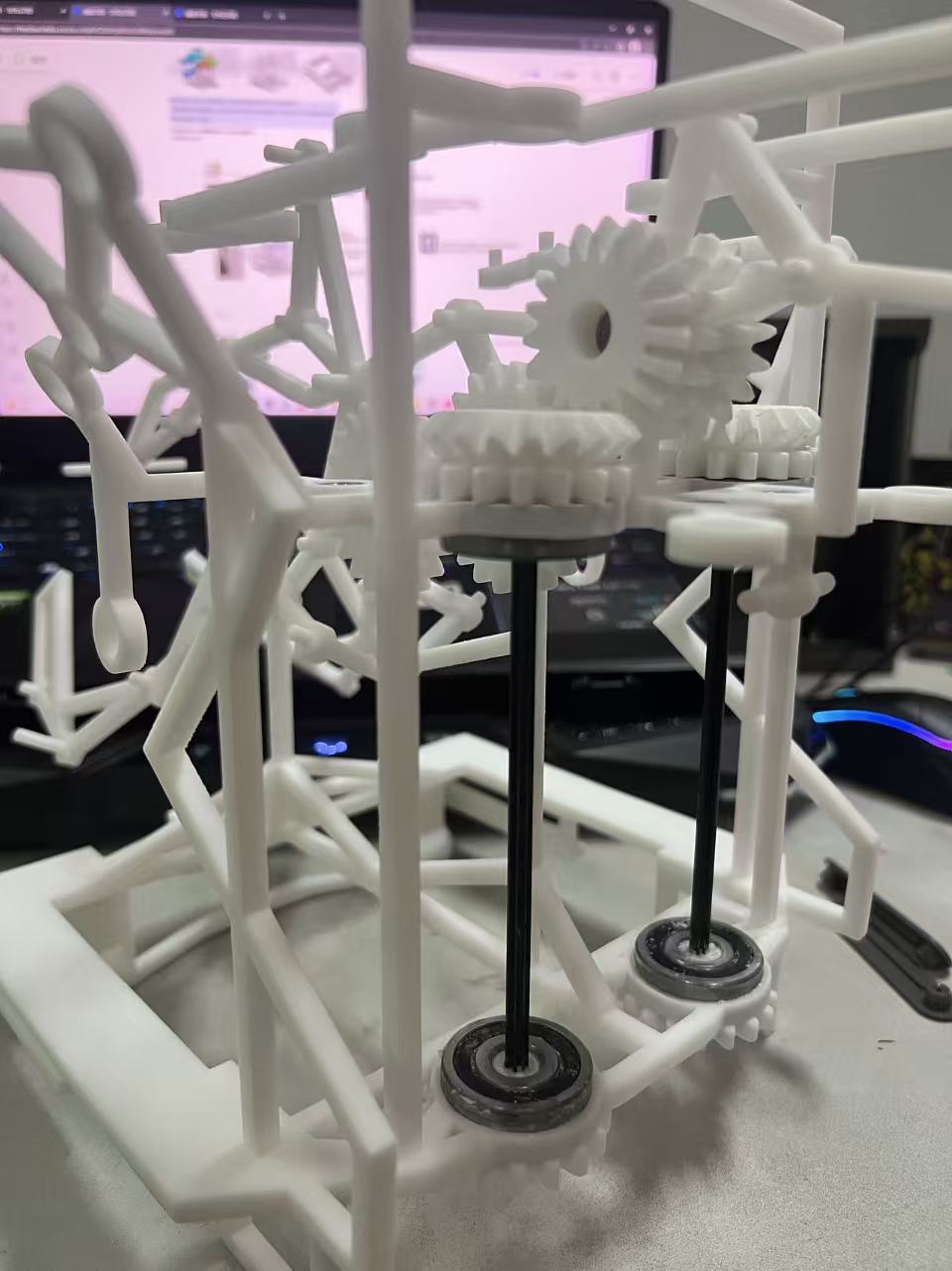
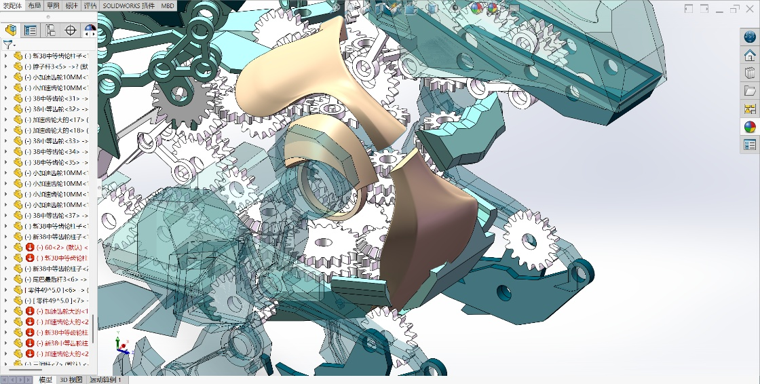
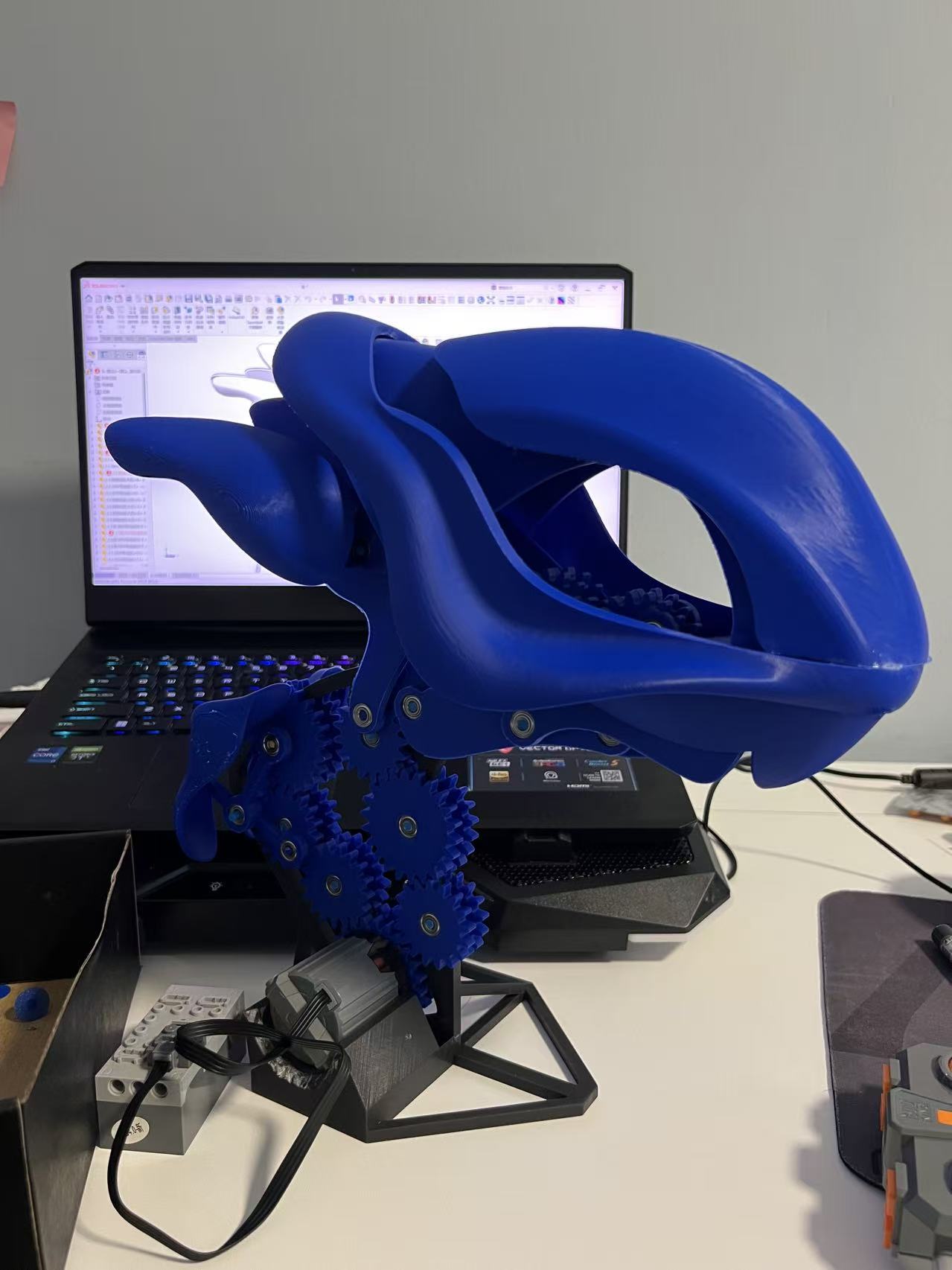
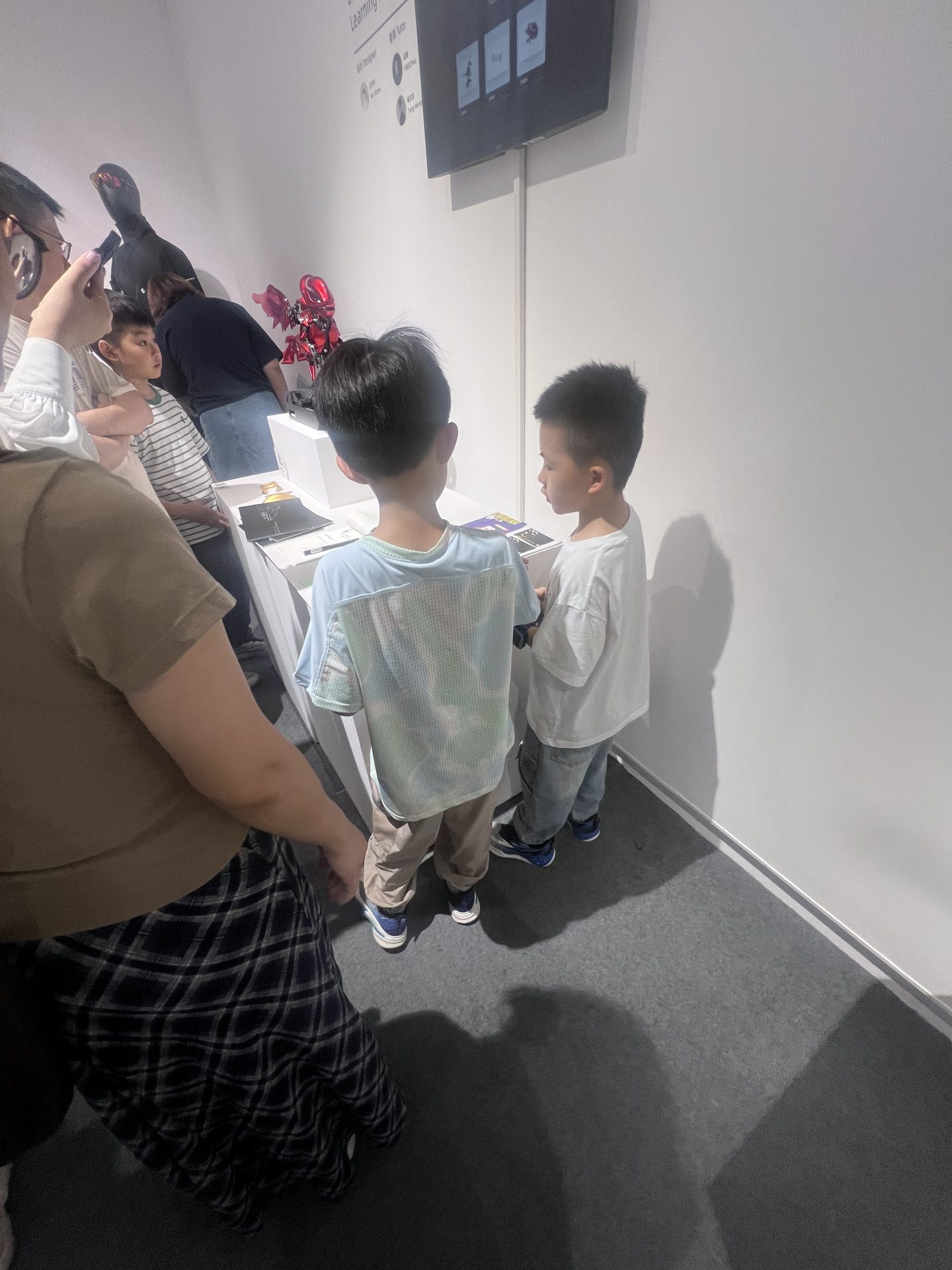
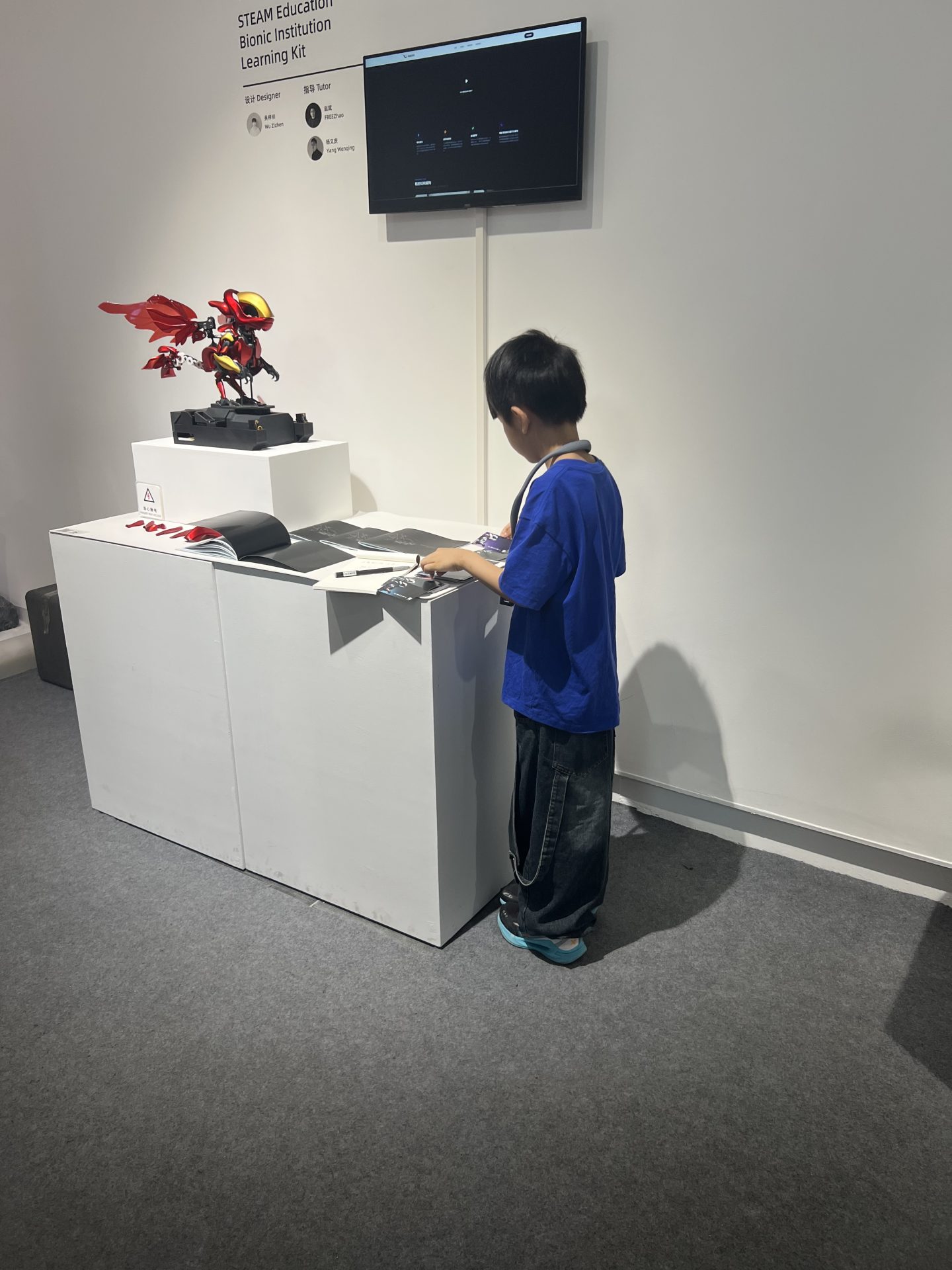
当我每天在观察小孩们对它的感受时,我能感受到它与它们的距离太过于遥远,因为我没能把前面几个简单的阶段做出来展示它的过渡,然后我连夜赶了一个手动版本出来,效果还是很不错。


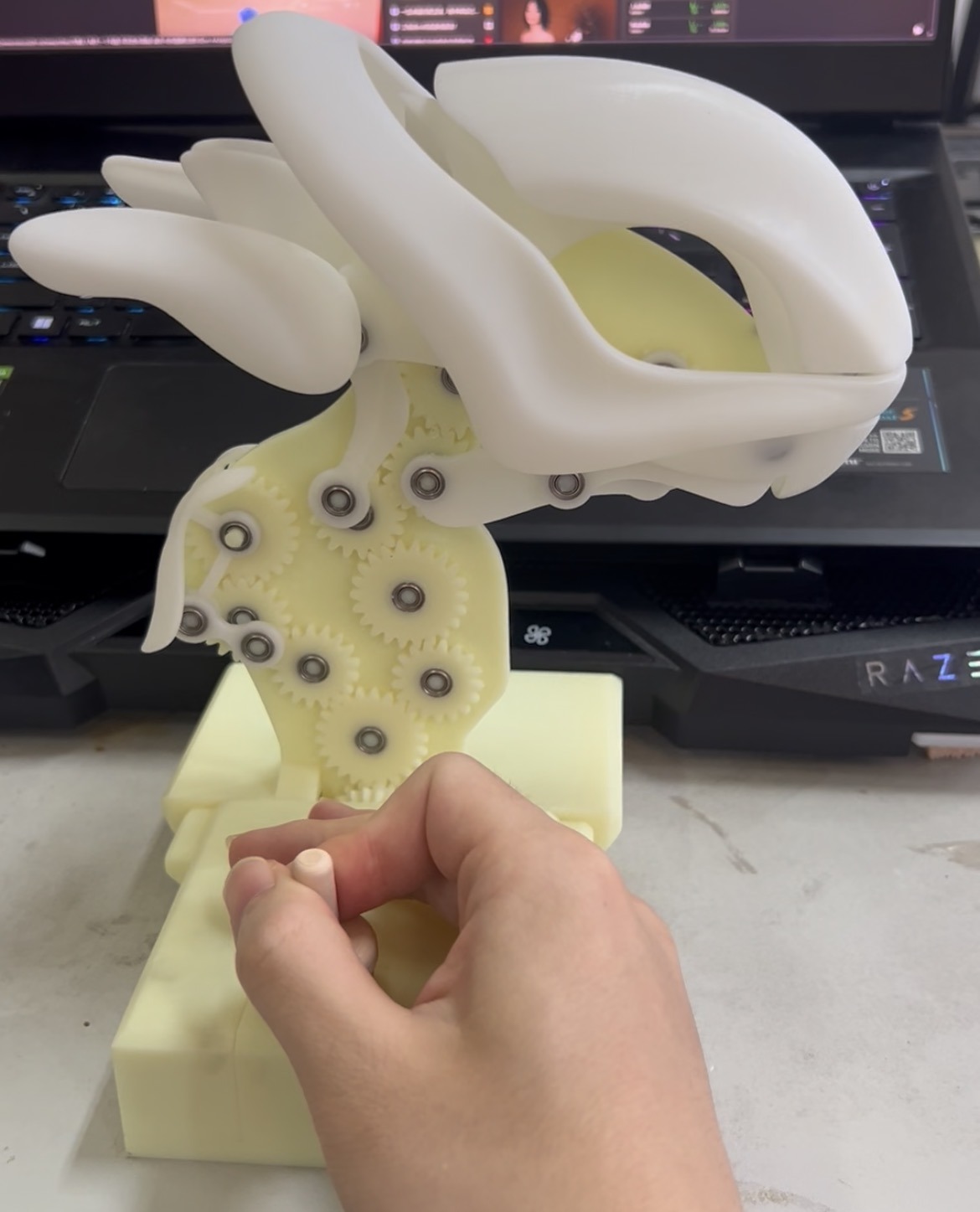
我在里面加了4:1减速齿轮,然后在把手内也加了轴承,能很丝滑地转动同时能清楚的看见齿轮之间的传动以及与连杆之间的配合。
结语
感谢我身边一直支持我的伙伴们,我会一直遵循我的内心并努力做好以后每个设计。


注:左2026.4.8 右2026.5.20
发表回复